top of page

🤖OUR ROBOT🤖
Iterations

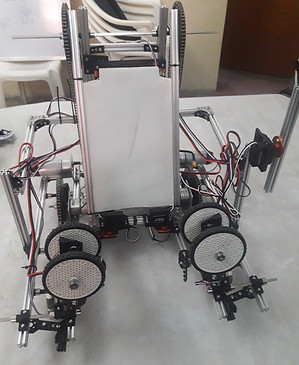
ITERATION #1
The very first iteration of our robot. This robot was designed to effectively control 3 boxes at once and also reach a height of 60cm for the combustion plant and 45cm for the reaction plant.
->

ITERATION #2
This is our second iteration, it was was designed to reach the 2 different heights while simultaneously trapping 2 boxes in the inside compartment.
->

iteration #4
The fourth iteration was designed to give the arms flexible movement forwards and backwards to reach any height and to have more control over the end effector.
->
->

ITERATION #3
The third iteration was designed to balance weight and keep the centre of gravity of our robot low. Our arm can also be likened to the human arm as it has hinge joints which enable it to move up and down but not sideways.

ITERATION #5
The final\ iteration was designed to increase air resistance on our arm and reduce the speed at which gravity acted on it. It also increased the space we had for storing boxes and keeping them in.

3D MODEL

3D MODEL DEMO
Engineering Notebook
Engineering Notebook
Coming Soon!!!
bottom of page